



✅ Hardware/Software Setup: Complete components list and Arduino code.
📄 Project Report: Detailed documentation covering design, circuit, and logic.
🎥 Project Demo: Demonstration video showing robot in action.
🚚 Free Delivery: Physical kit delivery if applicable.
💬 Enhanced Customer Support: Guidance for setup, troubleshooting, and programming help.
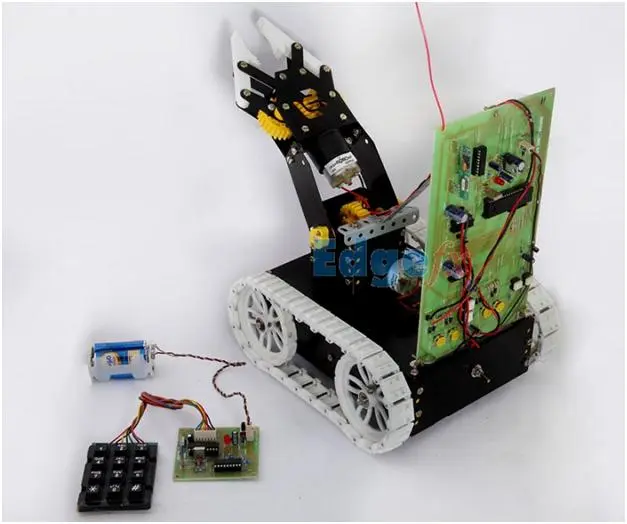
Pick and Place Robot Using Servo Gripper and Arduino
This project features an Arduino-based robotic arm equipped with a servo-powered gripper designed for automated object handling. By integrating precise servo motor control and programmable logic, the system can perform tasks such as picking, placing, and sorting objects, making it ideal for applications in automation, manufacturing, and educational robotics.
Category:
If you're interested in purchasing this project, please contact our expert — they will provide you with complete details and guidance regarding the project.
Project Overview
This project focuses on designing and implementing a pick-and-place robotic arm controlled by an Arduino microcontroller. The robotic arm is equipped with multiple servo motors and a servo-operated gripper, enabling it to grasp small objects, move them, and release them at designated locations.
The system is programmed to perform coordinated movements of the arm and gripper, providing a hands-on learning experience in robotics, automation, servo control, and embedded systems. This project is ideal for educational use and has real-world applications in factories, assembly lines, and warehouses.
Project Objectives
Design and build a servo-controlled robotic arm with gripper functionality.
Use Arduino to control individual arm segments and gripper movement.
Program coordinated motion for picking up and placing small objects.
Demonstrate the concept of basic automation and robotic handling.
Provide a modular, easy-to-understand platform for learning embedded systems.